Spark Ignition Engine Analysis
Challenge
- Characterize spark ignition combustion behavior across varying spark timing, engine load, and air-fuel ratio conditions
- Quantify the impact of each parameter on cylinder pressure, heat release rate, indicated efficiency, and burn duration
- Identify and analyze engine knock through pressure data and frequency-domain analysis
Approach
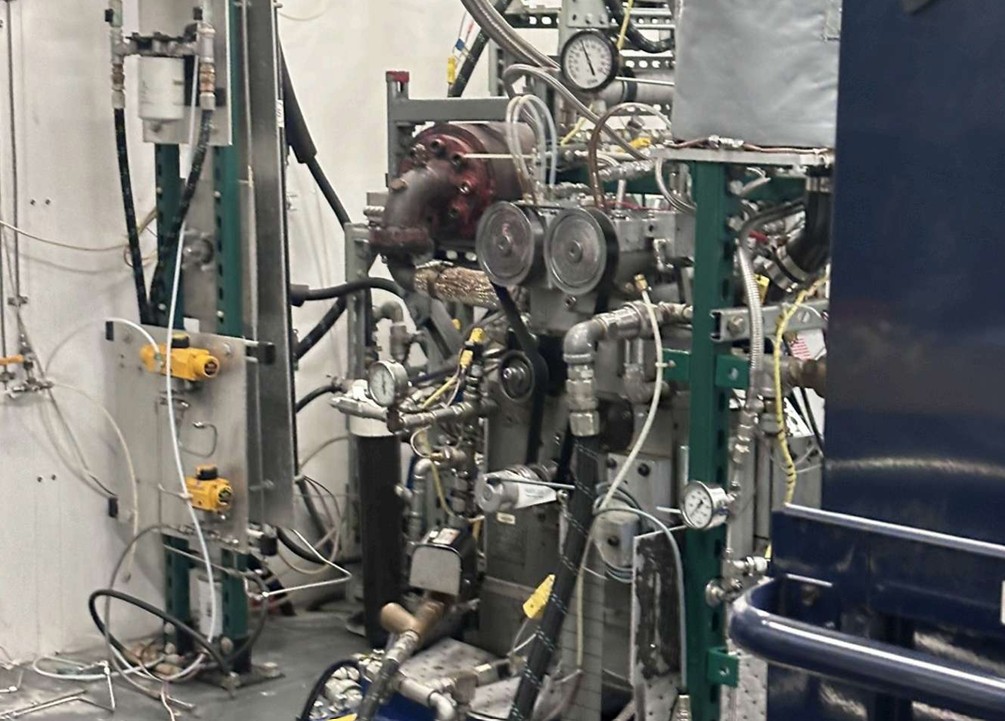
- Collected in-cylinder pressure data across 300 cycles per condition on a spark ignition engine test bench
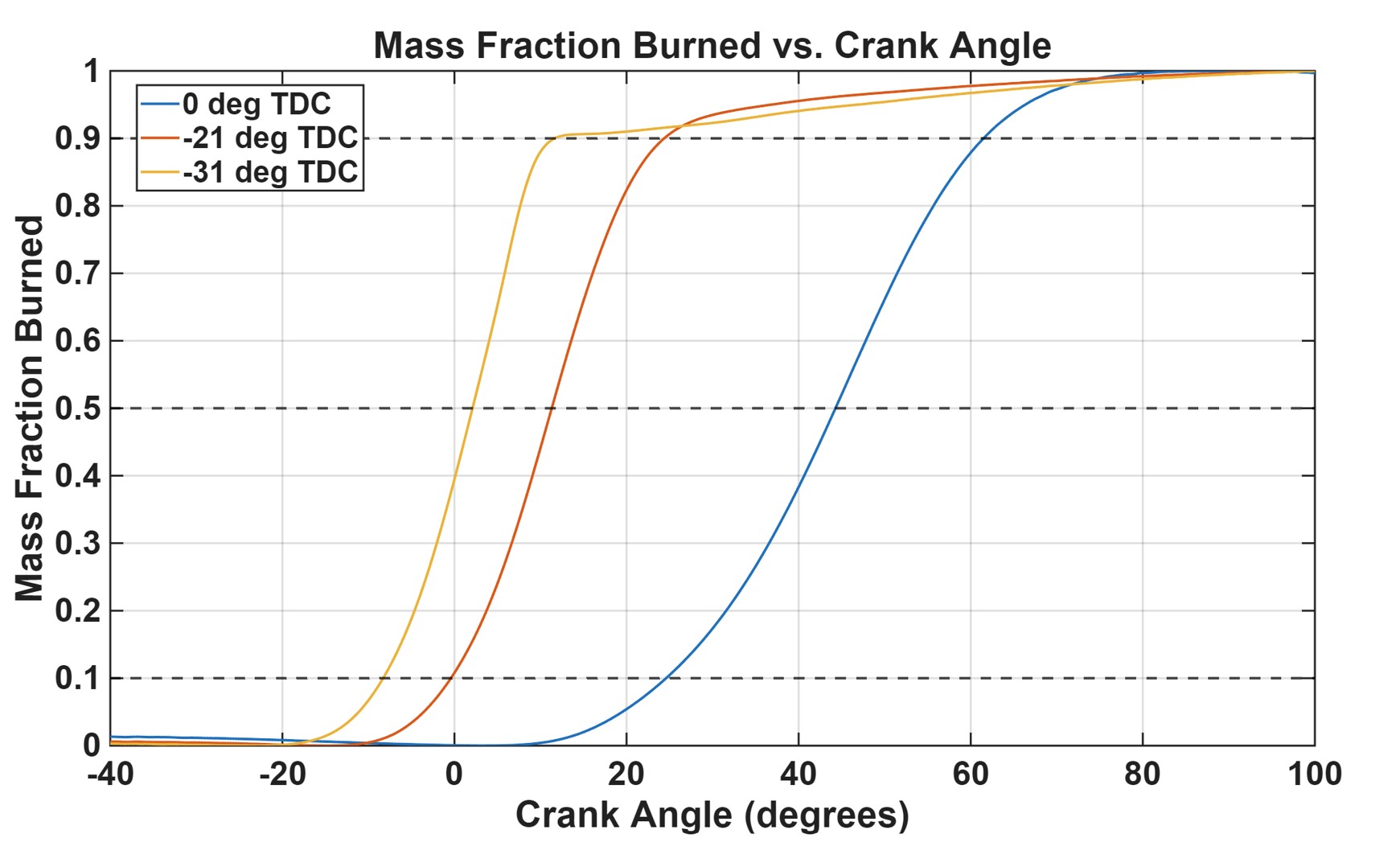
- Independently varied spark timing (0°, −21°, −31° BTDC), engine load (25%, 62.7%, 100%), and equivalence ratio (φ = 0.78–1.12)
- Computed net/gross IMEP, indicated thermal efficiency, mass fraction burned (CA10/CA50/CA90), heat release rate, and coefficient of variation in MATLAB
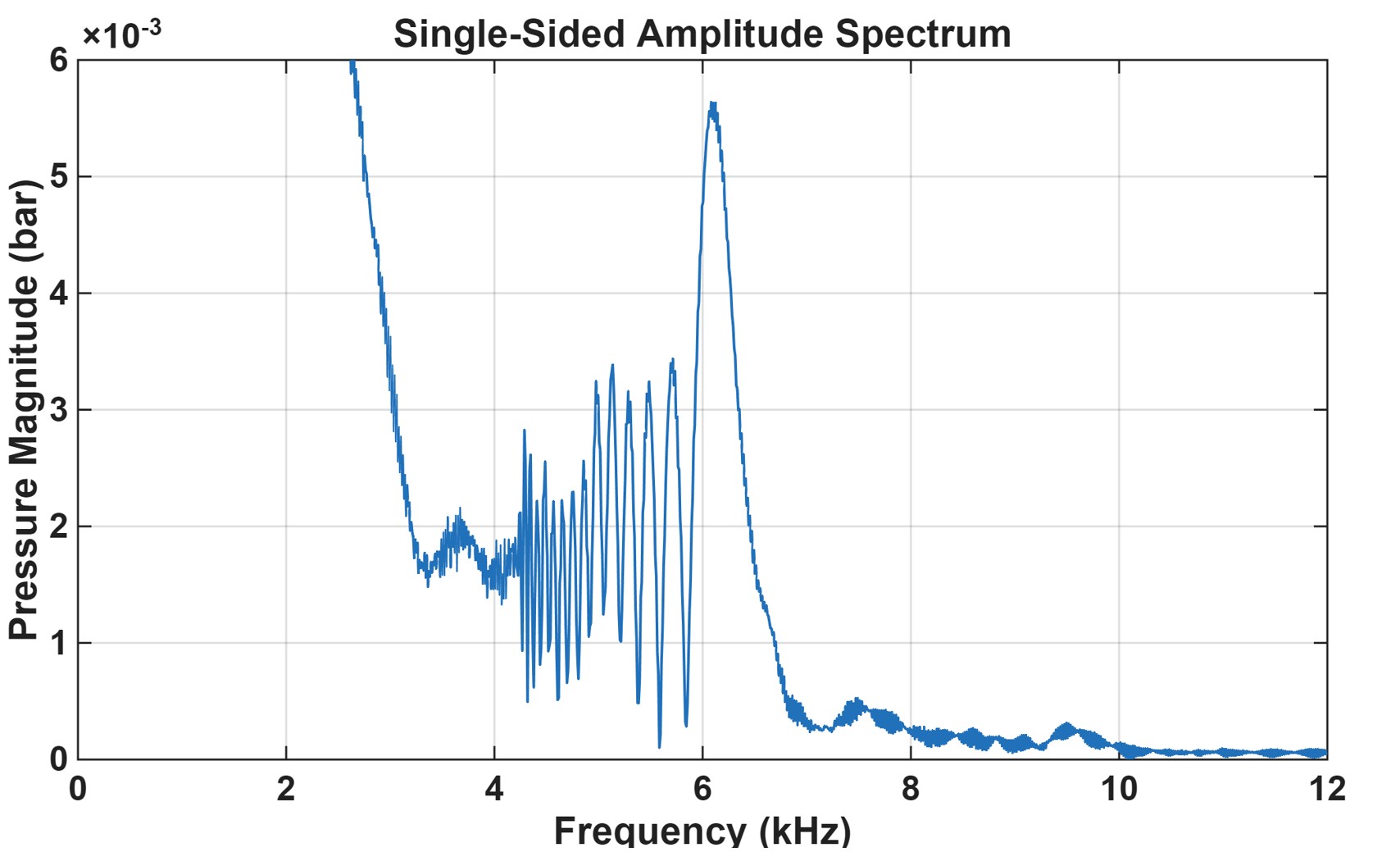
- Applied FFT frequency analysis to identify knock signature frequencies in cylinder pressure data
Solution
- Determined that −31° BTDC spark timing yielded the highest indicated efficiency (49.3%) with the shortest burn duration (19.7° CA)
- Found that a slightly lean mixture (φ = 0.9) maximized net indicated efficiency, while rich mixtures reduced efficiency due to incomplete combustion
- Quantified knock's effect on combustion variability—peak pressure variance rose from 1.3 to 30 and heat release rate variance from 50 to 1,760 compared to baseline
- Confirmed knock frequency signature at ~6 kHz via single-sided amplitude spectrum analysis